Virtuální ověření příjmu GNSS signálu během rušení za letu pro aplikace v letectví
Shodněme se na tom, že je vždy dobré vědět, kde se nacházíte – zejména když jste ve vzduchu? Problém ale je, že vaše přesná poloha nemusí být vždy známá. Moderní letadla – ať už jde o dopravní letouny nebo drony doručující balíky – určují svou polohu v reálném čase pomocí rádiových signálů (Radio Frequency – RF) vysílaných z družic systému GNSS (Global Navigation Satellite System). Pět satelitních sítí, které tvoří GNSS, se nachází zhruba 20 000 km nad povrchem Země a signály, které dopadají na anténu letadla, jsou velmi slabé. Pokud letoun proletí oblastí, kde silnější RF signál způsobí rušení (tzv. jamming) – ať už úmyslně nebo neúmyslně – může dojít ke ztrátě GNSS signálu. Dokud toto rušení nepomine, navigační systém nemusí být schopen určit aktuální polohu letounu – což může být zásadní problém, například při přistávání v mlze.
Jedním z řešení by bylo zdokumentovat konkrétní letovou trasu a zaznamenat, kdy a proč dochází ke ztrátě GNSS signálu. Tento přístup je ale neefektivní a nákladný – jednak by bylo nutné otestovat všechny běžné trasy a jednak může být rušení způsobeno i konstrukcí konkrétní antény, což by ovlivnilo jen letadla s touto anténou. Kromě toho může být příčinou i náhodný pozemní zdroj rušení, například kamion, jehož řidič používá nelegální rušičku, aby se vyhnul sledování přes mýtný systém. Naštěstí výzkumníci z Německého leteckého centra našli elegantnější a výrazně levnější řešení: použití simulačních nástrojů.
Začleněním reálných měření antény a analýzy její instalace do letových scénářů systému můžeme získat cenné poznatky o chování systému ještě před samotným letem. Tento přístup umožňuje realističtější zobrazení podmínek a parametrů, což přináší lepší predikci výsledků testů a výrazně šetří čas a peníze potřebné na více reálných letů. To ukazuje velký potenciál těchto nástrojů jako prediktivních řešení, která umožňují plánování experimentů nebo virtuální simulace různých konfigurací anténa–letoun v rušivých podmínkách s výsledky velmi blízkými reálným letům.
—Veenu Tripathi & Stefano Caizzone
Předpovídání reálných výsledků bez skutečných letů
Ve své studii „Virtuální ověření příjmu GNSS signálu během rušení za letu pro aplikace v letectví“ popsali autoři Veenu Tripathi a Stefano Caizzone svůj přístup, jak zajistit nepřerušený příjem GNSS signálu – a to bez nutnosti nákladných testovacích letů. Pomocí elektromagnetického simulačního softwaru Ansys HFSS a softwaru Ansys Systems Tool Kit (STK) pro digitální návrh misí vytvořili digitální dvojče, které rekonstruuje celý letový scénář (včetně dynamiky letu, skutečně použité antény na letadle a vlivu její instalace). Pomocí simulací pak předpovídali příjem a rušení signálu. Ukázali, že pomocí simulací lze analyzovat chování různých konfigurací anténa-letoun v konkrétních rušivých podmínkách.
Projekt probíhal ve fázích testování a ověřování. Nejprve navrhli pomocí HFSS kompaktní anténní pole o průměru 8,89 cm, které se skládalo z pěti prvků. Čtyři byly zaměřeny na pásma L1/E1 a jeden na pásmo L5/E5a. Tuto anténu následně vyrobili a testovali v polobezodrazové komoře v DLR, kde měřili elektromagnetická pole a převáděli je na ekvivalentní proudy pro další simulace. Poté použili software HFSS k propojení modelu antény s počítačovým modelem letounu. To jim umožnilo nejen sledovat vliv odrazů od trupu letadla na vyzařovací diagramy antény, ale také vytvořit digitální dvojče skutečného letadla s reálnou instalací antény.
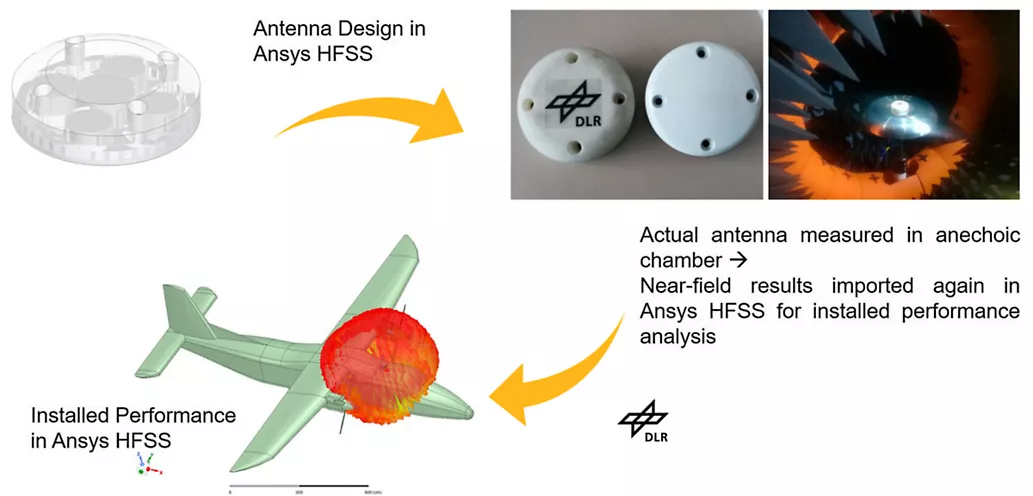
Využití elektromagnetického simulačního software Ansys HFSS ke spojení sítě antény s modelem letadla vytvořeným pomocí počítačového inženýrství (CAE), který později použili k ověření simulovaného výkonu antény během letu.
Tripathi a Caizzone dále v DLR měřili výkonnost antény určené k vysílání rušícího GNSS signálu do dráhy letu letadla. Tyto naměřené parametry – spolu s daty o výkonu letadla, anténního systému a vlastnostmi signálu z GNSS družic v pásmech L1 a E1 – importovali do softwaru STK. Díky tomu mohli sestavit kompletní simulaci scénáře, kdy letadlo narazí za letu na rušivý GNSS signál.
Jaký je rozdíl mezi GNSS a GPS signálem?
GNSS (Global Navigation Satellite System) je obecný pojem pro všechny globální družicové navigační systémy, které umožňují určit polohu kdekoliv na Zemi pomocí satelitů. Je to „nadřazený“ pojem.
Mezi GNSS patří:
- GPS (USA)
- GLONASS (Rusko)
- Galileo (EU)
- BeiDou (Čína)
GPS (Global Positioning System) je konkrétní americký systém, historicky první a nejrozšířenější. 👉 Takže každý GPS signál je součástí GNSS, ale ne každý GNSS signál je GPS.
Dostupné webináře k této tématice

Zajímá Vás problematika vesmíru?
Rušení GPS signálu – tzv. jamming – představuje vážnou hrozbu pro letecké a obranné operace. V tomto webináři Vám ukážeme, co rušení způsobuje, jaké má dopady na navigaci a komunikaci – a jak jej efektivně simulovat a vyhodnocovat. Pomocí moderních nástrojů dokážete navrhnout robustní mise odolné vůči rušení.
Zajímá Vás problematika vesmíru?
- Co je Ansys STK a jak může obohatit vaše projekty?
- Jak lze modelovat a simulovat letové trajektorie a satelitní systémy k zajištění optimálních drah a postupů?
- Jak můžete analyzovat pokrytí a efektivitu komunikačních systémů a maximalizovat dosah a spolehlivost?
- a další...
Ověření výsledků simulací
Pro ověření výsledků simulace letěli Tripathi a Caizzone s letounem vybaveným jejich anténou navrženou v HFSS po testovací trase. Měřili skutečný výkon čtyř antén během letu – jak při přítomnosti rušení, tak bez něj. Následně porovnali tato měření s výsledky ze simulací v HFSS a STK a zjistili velmi dobrou shodu mezi oběma sadami dat.
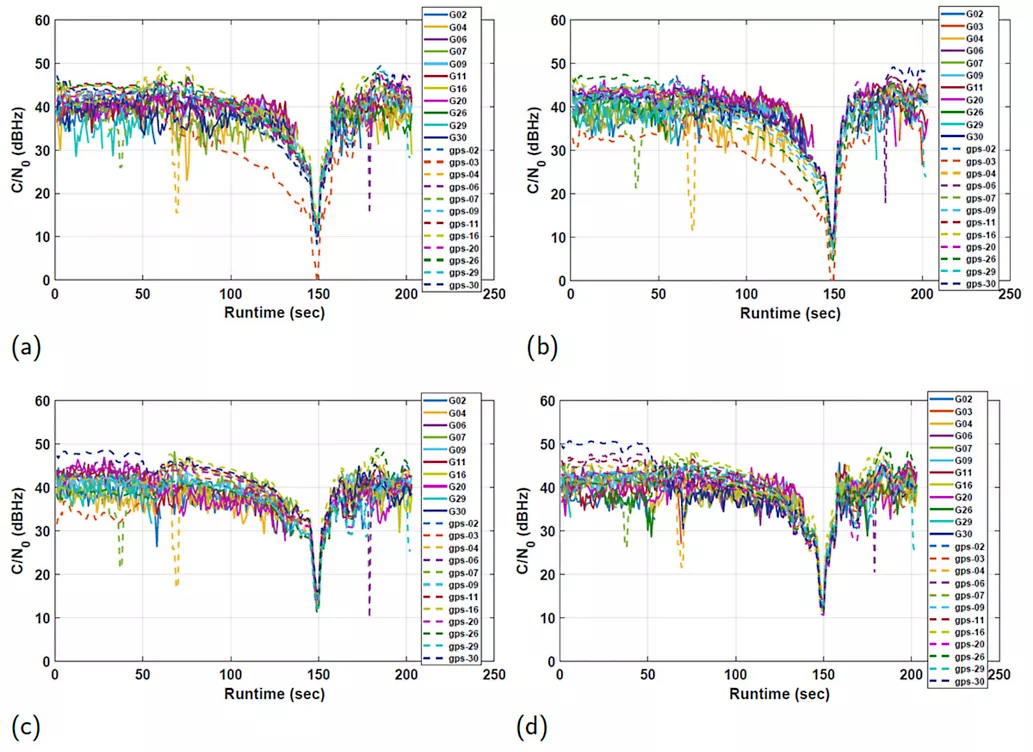
Naměřená vs. výpočtem podle mise určená data poměru nosné k šumu pro konektivitu mezi jednotlivými anténními prvky L1/E1 a jedenácti různými satelity GNSS v přítomnosti rušicího signálu.
(a) Anténa 1. (b) Anténa 2. (c) Anténa 3. (d) Anténa 4.
Plné čáry = naměřené výsledky; přerušované čáry = simulované výsledky.
„G#“ a „gps-#“ označují zdroj GPS signálu.